Presto finito il secondo corso di robotica organizzato a San Pietro a Natisone/Spietar da AdFormandum. Oggi i ragazzi hanno costruito un insect bot, hanno imparato ad usare Arduino per programmarlo. Come prima cosa abbiamo analizzato il movimento di un insect bot che avevo costruito e programmato precedentemente e cercato di capire quali sono gli elementi che dovremo “programmare”, il funzionamento delle “zampe” e del sensore. Così alla fine il nostro insect bot ha scorazzato per la classe.
Aggiornamento del 14/04:
Da qualche giorno sto seuendo un corso sull’Intelligenza artificiale su
Udemy e scoprire che durante il corso ho applicato le basi della IA
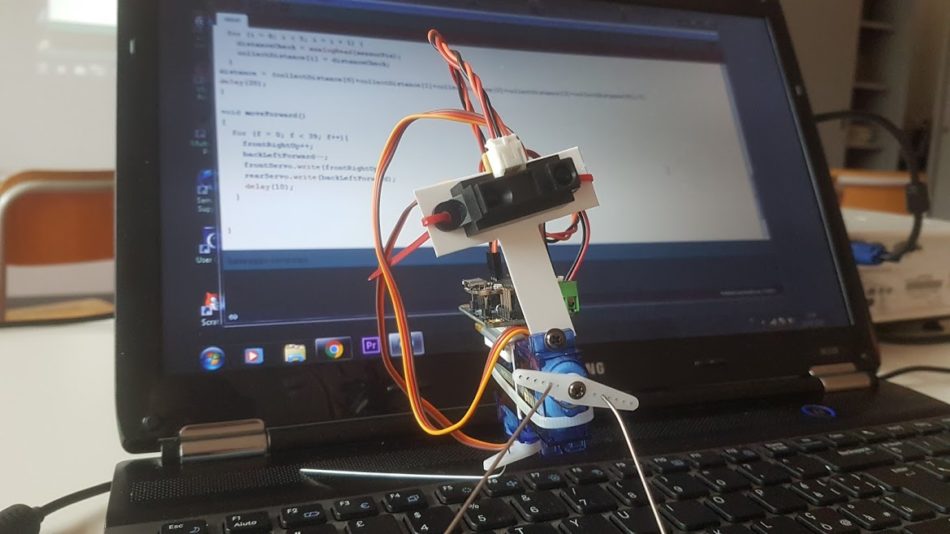
inconsapevolmente. La parte in questione è dove l’insectbot deve
decidere dove andare appena trova un ostacolo, analizzando un array di
dati estrapola un valore medio che lo farà deviare. Ovviamente siamo
alla prima fase dell’equazione Bellman non c’è ancora la fase di
conoscenza e acquisizione dell’ambiente anche perché il programma base
per il bot non lo prevede (ancora).







